Zusammenfassung
Durch die Entwicklung einer dynamischen Kennlinienanpassung für Greifkraft und Endeffektkoordination hat die Technische Universität Darmstadt ein intrinsisch-haptisches Feedbackverfahren zur Anwendung in Teleoperationssystemen geschaffen.
Problemstellung
Die Integration eines haptischen Feedbacks in medizinischen Teleoperationssystem hat das Potenzial zu einer Senkung des Trauma-Risikos bei Operationen, einer verkürzten Operationszeit und einer Senkung des Stresses beim operierenden Arzt. Dennoch befinden sich bislang keine Teleoperationssysteme mit haptischem Feedback im klinischen Einsatz, was unter anderem an einer mangelhaften regelungstechnischen Stabilität der Systeme liegt.
Lösungsansatz & Vorteile
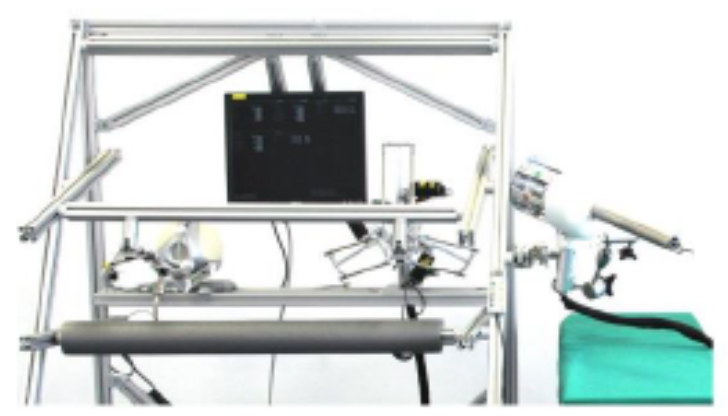
Die Technische Universität Darmstadt hat einen Chirurgieroboter entwickelt, der auf Basis einer Master-Slave-Struktur operiert (FLEXMIN). In der Anwendung gibt der Nutzer über eine Bedieneinheit (Master) eine Position vor, die anschließend vom Endeffektor (Slave) ausgeführt wird. Die am Endeffektor gemessenen Interaktionskräfte werden dem Arzt als haptisches Feedback übermittelt, um einen realistischen Eindruck der Interaktion zu ermöglichen. Zu den Vorteilen der Technologie zählen eine Reduktion der Anzahl an Aktoren in der Bedieneinheit sowie eine Erhöhung der regelungstechnischen Stabilität des Systems.
Die Anwendungsmöglichkeiten der Entwicklung liegen nicht nur in der Medizintechnik, sondern in allen Bereichen, in denen eine haptisch-visuelle Interaktion stattfindet (Handhabungstechnik, Mikro- und Nanomanipulation).
Kontakt
Entwicklung von: Technische Universität Darmstadt
Sie interessieren sich für den Einsatz dieser oder einer vergleichbaren Technologie in Ihrem Unternehmen? – Sprechen Sie uns an. Wir kümmern uns um den Expertenkontakt und auf Wunsch um die Suche nach einem passenden Förderprogramm. Auf kontakt.edecy.de können Sie direkt einen für Sie passenden Termin auswählen.